長寧區精密減速機
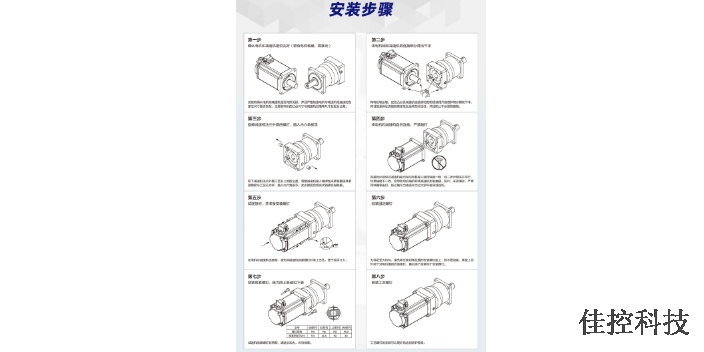
伺服電機減速機錯位是指什么?電機減速機錯位即是失步,失步分為丟步和越步。步進電動機正常工作時,每接收一個控制脈沖就移動一個步距角,即前進一步。若連續地輸入控制脈沖,電動機就相應地連續轉動。丟步時,轉子前進的步數小于脈沖數;越步時,轉子前進的步數多于脈沖數。一次丟步和越步的步距數等于運行拍數的整數倍。丟步嚴重時,將使轉子停留在一個位置上或圍繞一個位置振動,越步嚴重時,拖動結構將發生過沖。關于步進電機減速機丟步和失步的分析:步進電機減速機選型不當,電機力矩不夠或者物體運動的慣量超過電機自鎖力,造成的丟步或失步。驅動器選型不當,配套的驅動器電流偏小,影響電機正常運轉,現在市面上很多電流虛標的驅動器,拿峰值電流當額定電流來忽悠消費者,驅動器選型額定電流應大于步進電機減速機額定電流的1.2-1.5倍。配套電源選型不當,配套電源應是驅動器額定電源的1.5-2倍,電源虛標比驅動器虛標更嚴重。控制部分應排除干擾,遠離變頻器,防靜電。模塊化設計的減速機,方便后期升級與維護。長寧區精密減速機

所謂聯軸器的徑向剛度是指聯軸器兩軸產生每單位徑向位移Δy需要的徑向力。徑向剛度越大,徑向力就越大,對連接軸強度不良影響就越大,非金屬彈性元件撓性聯軸器,如彈性套圓柱銷聯軸器、梅花聯軸器、輪胎式聯軸器等,其徑向剛度就小。但是某些制造質量很差的聯軸器,其徑向剛度很大,當兩軸不對中有徑向位移時,軸上的附加徑向力就很大,嚴重影響軸的強度。半聯軸器上的矩形直線齒廓就很不利于徑向位移的調整。旋轉零件的靜平衡或動平衡不好,將會使旋轉零件產生離心力,增加了軸的附加應力,從而影響軸的強度。圖為半聯軸器——軸——減速機的配置關系,圖中半聯軸器質量有點偏心。普陀區轉角高精密減速機大概多少錢良好散熱與通風的減速機,保證設備長時間工作。
精密行星減速機的另一個發展趨勢是高扭矩密度。在一些對空間和重量有嚴格限制但又需要高扭矩輸出的應用場景中,如電動汽車、機器人關節等,提高扭矩密度至關重要。制造商通過優化行星減速機的結構設計來實現這一目標。例如,采用新型的行星輪系布置方式,增加行星輪的數量或改進行星輪的形狀,在不增加減速機體積的情況下提高其承載能力和扭矩輸出。同時,使用高性能的材料和先進的制造工藝,提高齒輪和其他部件的強度和剛度,使得減速機能夠在更小的空間內承受更大的扭矩,為設備的小型化和高性能化提供有力支持。
這里包括了兩種,一種角傳動精度,這是減速機手冊里都會標出來的,這影響的是機器人的定位精度;另一種是重復定位精度,這是減速機手冊里沒有,這影響的是機器人的重復定位精度。角傳動精度一般減速機廠家都有專業的設備,但是客戶自己也可以設計一些簡易的方法去測。重復定位精度也一樣。對于新減速機來說,要達到標稱的1弧分以下,很多廠家是OK的,但是比較大的問題是一致性和穩定的。可能大部分廠家一開始精度都達標,但幾個月后,要么精度跳上跳下,要么直接是越來越差;重復定位精度也如此,短時間內達到較高重復定位精度是沒什么問題,但是時間長了,如何保持住就很難了!!具備過載保護功能的減速機,為設備運行筑牢安全防線。
精密行星減速機具有出色的承載能力,這主要歸因于其獨特的結構。多個行星輪均勻分布在太陽輪周圍,共同承擔負載,使得每個行星輪所承受的載荷相對較小。同時,行星輪與太陽輪、內齒圈之間的嚙合方式能夠有效地傳遞和分散扭矩。這種結構設計使得行星減速機在處理大扭矩負載時表現優異。例如,在重型機械的驅動系統中,行星減速機可以承受巨大的扭矩,確保機械的穩定運行。在起重機的起升機構中,行星減速機能夠可靠地承載重物的重量,并將電機的動力轉化為合適的起升速度和扭矩,保證起吊過程的安全和穩定,滿足工業生產中對大負載設備的驅動需求。高精度齒輪傳動的減速機,保證設備運行的穩定性。金山區精密減速機哪個好
優化齒形設計的減速機,提高齒輪的承載能力與耐用性。長寧區精密減速機
精密行星減速機的工作原理基于齒輪傳動。當動力從輸入軸傳遞到太陽輪時,太陽輪開始轉動。太陽輪的旋轉帶動與其嚙合的行星輪轉動,行星輪在自轉的同時圍繞太陽輪公轉。由于行星輪與內齒圈也相互嚙合,內齒圈固定不動,行星輪的公轉運動通過行星架輸出。通過合理設計太陽輪、行星輪和內齒圈的齒數比,可以實現不同的減速比。例如,若太陽輪有 10 個齒,行星輪有 20 個齒,內齒圈有 50 個齒,根據行星減速機的傳動比計算公式,可以得出相應的減速比。這種齒輪傳動方式使得動力在傳遞過程中能夠精確地減速,并且能夠保證較高的傳動效率,減少能量損失,為需要精確速度和扭矩控制的設備提供了可靠的動力傳輸解決方案。長寧區精密減速機
- 嘉定區轉角高精密減速機產品介紹 2025-07-23
- 精密型減速機廠家供應 2025-07-23
- 長寧區齒輪減速機大概多少錢 2025-07-23
- 虹口區轉角高精密減速機 2025-07-23
- 江蘇100w伺服電機 2025-07-23
- 金山區減速機哪里好 2025-07-23
- 江蘇現代化減速機排行榜 2025-07-23
- 虹口區精密減速機排行榜 2025-07-23
- 伺服馬達伺服電機代理費用 2025-07-23
- 虹口區精密型減速機現價 2025-07-22
- 松江區智慧應急數字駕駛艙一體化 2025-07-23
- 甘肅高密度絕緣紙特點 2025-07-23
- 北京配網故障定位裝置廠 2025-07-23
- 吉林子鐘時鐘系統廠家供應 2025-07-23
- 浙江2840鋁合金導軌結構 2025-07-23
- 滁州智能斷路器開關 2025-07-23
- 海安標準AGV智能機器人設備貨源充足 2025-07-23
- 鹽城品牌智能監控系統價錢 2025-07-23
- 深圳充電樁咨詢問價 2025-07-23
- 青浦區家用配電柜維修師傅 2025-07-23