-
 安徽智能清洗機器人哪家好
安徽智能清洗機器人哪家好國自機器人獲評首臺(套)項目一覽,2014年變電站KYN開關柜智能操控機器人;2015年基于多驅動單元同步控制的重載搬運機器人;2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列...
2025-05-10 -
 江蘇電站清洗機器人哪家好
江蘇電站清洗機器人哪家好光伏板清掃機器人發展前景預測的方法很多,主要有以下幾種:1、時間序列在光伏板清掃機器人發展前景預測中,經常遇到一系列依時間變化的經濟指標值,如光伏板清掃機器人企業產品按年(季)的銷售額、供給量等,這些按時間先后排列起來的一組數據稱為時間序列。依時間序列進行...
2025-05-10 -
 河北光伏運維機器人品牌
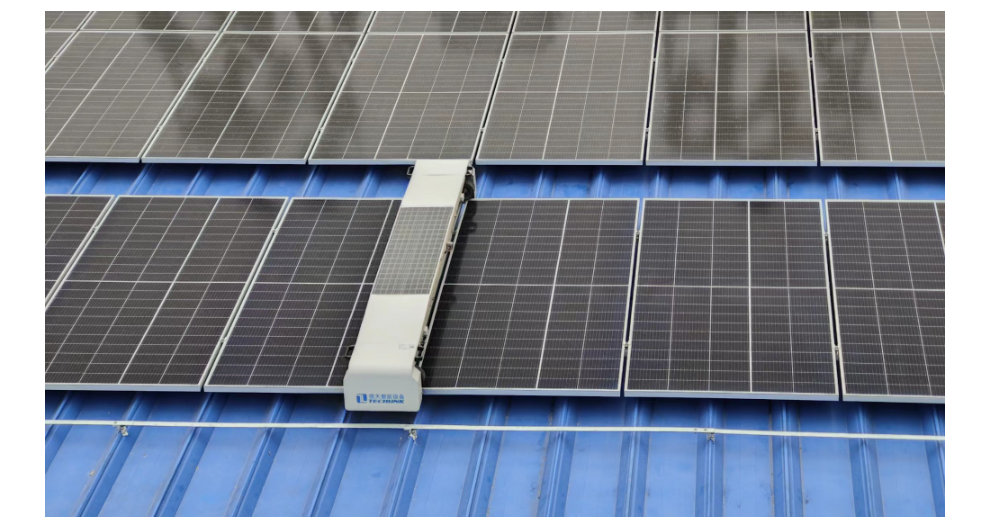
河北光伏運維機器人品牌SUNBOT光伏清潔機器人在屋頂電站執行清洗任務目前,國自機器人“子母式跨陣列作業光伏清潔機器人”系統已經為國內外數百個電站提供了清洗服務,為清潔能源事業的發展助力,也為實現中國2060年碳中和目標貢獻一份力量。首臺(套)首臺(套)是“首臺套重大技術裝備”...
2025-05-10 -
浙江電站清掃機器人廠家
關于數據傳輸:光伏清掃機器人系統配2個數據傳輸模塊,用于機器人本體、擺渡車、服務器之間的傳輸,本體安裝物聯網卡用于云平臺及本地服務器的網絡通信。關于機器人數量:光伏清掃機器人應用在電站中,根據方陣的布局,設計停機架、橋接、擺渡車等輔助性結構,并確定機器人清掃范...
2025-05-10 -
 內蒙古光伏清洗機器人費用
內蒙古光伏清洗機器人費用近年來,航天基地圍繞“3+3+2”現代產業體系,重點聚焦航天、光伏新能源兩大特色領域,著力布局重大科技創新平臺,鼓勵支持企業開展關鍵技術創新。同時,加快搭建協同創新“新平臺”,搭建科技成果轉移轉化服務“新網絡”,培育技術轉移人才“新隊伍”,進一步促進科技成果轉...
2025-05-09 -
內蒙古光伏清洗機器人品牌
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人;2015:基于多驅動單元同步控制的重載搬運機器人;2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列...
2025-05-09 -
 江蘇智能清掃機器人品牌
江蘇智能清掃機器人品牌近年來,航天基地圍繞“3+3+2”現代產業體系,重點聚焦航天、光伏新能源兩大特色領域,著力布局重大科技創新平臺,鼓勵支持企業開展關鍵技術創新;同時,加快搭建協同創新“新平臺”,搭建科技成果轉移轉化服務“新網絡”,培育技術轉移人才“新隊伍”,進一步促進科技成果轉...
2025-05-09 -
 河南光伏清洗機器人廠家
河南光伏清洗機器人廠家國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人;2017:基于測量式激光導航的叉式搬運機器人物流系統;2020:SUNBOT子母式跨陣列...
2025-05-09 -
西藏光伏清掃機器人多少錢
智能光伏清潔機器人的優勢及特點:行走驅動裝置采用模塊化設計,由大功率直流電機驅動,具有較強的地形適應性。適用于各種規格的光伏組件;光伏組件安裝平整度低;內置大容量低溫動力鋰電池,完整的充電控制電路和智能電源管理程序,確保各種終端的正常運行;自帶光伏發電系統和清...
2025-05-09 -
 河北電站清洗機器人廠家
河北電站清洗機器人廠家輥刷拼接設計,易于組裝和維護。自適應傾斜行走驅動裝置可輕松應對光伏組件陣列從上到下、從左到右、從前到后的變化;光伏組件的框架用作軌道,無需鋪設軌道,成本低,便于現場安裝和施工。自適應跟蹤裝置**提高了光伏組件陣列橋接的施工效率,**縮短了施工周期;電控系統...
2025-05-09 -
新疆光伏智能清掃機器人價格
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人 2015,基于多驅動單元同步控制的重載搬運機器人 2016,面向太陽能光熱發電場的鏡面清洗機器人 2017,基于測量式激光導航的叉式搬運機器人物流系統 2020,SUNBOT子母式跨...
2025-05-09 -
 北京光伏清掃機器人廠家價格
北京光伏清掃機器人廠家價格輥刷拼接設計,易于組裝和維護。自適應傾斜行走驅動裝置可輕松應對光伏組件陣列從上到下、從左到右、從前到后的變化;光伏組件的框架用作軌道,無需鋪設軌道,成本低,便于現場安裝和施工。自適應跟蹤裝置**提高了光伏組件陣列橋接的施工效率,**縮短了施工周期;電控系統...
2025-05-09 -
 湖南光伏清洗機器人報價
湖南光伏清洗機器人報價光伏組件清掃機器人一、人工干洗光伏板操作人員采用長柄絨拖布配合**洗塵劑進行清洗,干洗的工作周期約為3天/10MW,費用約為12000-13000元/10MW。主要原理:利用靜電吸附原理,具有吸附灰塵和沙粒的作用,增強塵推吸塵去污能力,能有效地避免在清掃時...
2025-05-09 -
青海電站清掃機器人費用
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人;2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作...
2025-05-09 -
 新疆光伏智能清洗機器人
新疆光伏智能清洗機器人國自機器人獲評首臺(套)項目一覽,2014年變電站KYN開關柜智能操控機器人;2015年基于多驅動單元同步控制的重載搬運機器人;2016年面向太陽能光熱發電場的鏡面清洗機器人;2017年基于測量式激光導航的叉式搬運機器人物流系統;2020年SUNBOT子母式跨...
2025-05-09 -
河南光伏掃地機器人多少錢
國自機器人獲評首臺(套)項目一覽:2014,變電站KYN開關柜智能操控機器人 2015,基于多驅動單元同步控制的重載搬運機器人 2016,面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列...
2025-05-09 -
甘肅電站清掃機器人生產廠家
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人;2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作...
2025-05-09 -
青海光伏智能清洗機器人多少錢
之前光伏電站多采用傳統的人工清掃方式,成本高,操作不當還會造成光伏組件的破損。很多電站一年才能清掃四次。”智能清掃機器人可以通過手持遙控裝置或電腦后臺操作系統,根據不同的地域和季節設定清掃時間、清掃次數,實現全天候自動清掃。沒有灰塵的遮擋,能源利用率將**...
2025-05-09 -
 江西光伏清掃機器人費用
江西光伏清掃機器人費用搜集資料進行光伏板清掃機器人發展前景預測必須占有充分的資料。有了充分的資料,才能為光伏板清掃機器人發展前景預測提供進行分析、判斷的可靠依據。在光伏板清掃機器人發展前景預測計劃的指導下,調查和搜集預測有關資料是進行光伏板清掃機器人發展前景預測的重要一環,也是...
2025-05-09 -
山東光伏智能清掃機器人報價
國自機器人獲評首臺(套)項目一覽:2014,變電站KYN開關柜智能操控機器人 2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作...
2025-05-09 -
 廣西電站清掃機器人報價
廣西電站清掃機器人報價搜集資料進行光伏板清掃機器人發展前景預測必須占有充分的資料。有了充分的資料,才能為光伏板清掃機器人發展前景預測提供進行分析、判斷的可靠依據。在光伏板清掃機器人發展前景預測計劃的指導下,調查和搜集預測有關資料是進行光伏板清掃機器人發展前景預測的重要一環,也是...
2025-05-08 -
遼寧光伏清洗機器人費用
智能光伏清潔機器人的優勢及特點:行走驅動裝置采用模塊化設計,由大功率直流電機驅動,具有較強的地形適應性。適用于各種規格的光伏組件。光伏組件安裝平整度低;內置大容量低溫動力鋰電池,完整的充電控制電路和智能電源管理程序,確保各種終端的正常運行;自帶光伏發電系統...
2025-05-08 -
山西電站清掃機器人
光伏清掃機器人是一種特定應用于光伏電站的清潔機器人,旨在提高光伏電站的發電量和收益。它可以清潔光伏板表面的灰塵、污垢和鳥糞等污染物,提高光伏板的發電效率,同時減少人工清潔的時間和成本。光伏清掃機器人通常由以下幾個部分組成:清潔毛刷:清潔毛刷是光伏清掃機器人...
2025-05-08 -
湖北電站清洗機器人報價表
1、確定目標明確目的,是開展光伏板清掃機器人發展前景預測工作的第一步,因為預測的目的不同,預測的內容和項目、所需要的資料和所運用的方法都會有所不同。明確預測目標,就是根據光伏板清掃機器人企業經營活動存在的問題,擬定預測的項目,制定預測工作計劃,編制預算,調...
2025-05-08 -
 電站清洗機器人報價
電站清洗機器人報價原鋁的積累量不斷增加,廢料回收有巨大的發展潛力。鋁合金的回收和再生是一項十分復雜的技術工作,由于各種鋁制品使用范圍寬廣而且分散,如何回收、集中、分類、實現再生加工是一項十分繁雜龐大的系統工程。全世界不同合金成分、不同性能的鋁合金數以百計,其中許多合金中的成分元...
2025-05-08 -
甘肅光伏掃地機器人哪家好
之前光伏電站多采用傳統的人工清掃方式,成本高,操作不當還會造成光伏組件的破損。很多電站一年才能清掃四次。”智能清掃機器人可以通過手持遙控裝置或電腦后臺操作系統,根據不同的地域和季節設定清掃時間、清掃次數,實現全天候自動清掃。沒有灰塵的遮擋,能源利用率將**...
2025-05-08 -
 浙江電站清洗機器人報價表
浙江電站清洗機器人報價表國自機器人獲評首臺(套)項目一覽:2014年變電站KYN開關柜智能操控機器人;2015:基于多驅動單元同步控制的重載搬運機器人2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列作...
2025-05-08 -
寧夏智能清掃機器人廠家價格
光伏組件自動清洗設備注意事項:1.避免在高溫和強烈光照下清洗,以防被電擊或可能對組件造成破壞。2.組件鋁框和支架有許多鋒利尖角,因此在清潔時要注意避免剮蹭受傷,3.禁止***光伏組件、支架等光伏系統設備。4.嚴禁在大風、雷雨天氣的條件下清理光伏組件,5.不...
2025-05-08 -
山西光伏智能清掃機器人品牌
國自機器人獲評首臺(套)項目一覽:2014:變電站KYN開關柜智能操控機器人;2015:基于多驅動單元同步控制的重載搬運機器人;2016:面向太陽能光熱發電場的鏡面清洗機器人2017:基于測量式激光導航的叉式搬運機器人物流系統2020:SUNBOT子母式跨陣列...
2025-05-08 -
江西光伏運維機器人價格
光伏組件自動清洗設備注意事項:1.避免在高溫和強烈光照下清洗,以防被電擊或可能對組件造成破壞。2.組件鋁框和支架有許多鋒利尖角,因此在清潔時要注意避免剮蹭受傷,3.禁止***光伏組件、支架等光伏系統設備。4.嚴禁在大風、雷雨天氣的條件下清理光伏組件,5.不...
2025-05-08