-
 無(wú)錫進(jìn)口晶圓運(yùn)送機(jī)械吸臂維修
無(wú)錫進(jìn)口晶圓運(yùn)送機(jī)械吸臂維修有用于輸送半導(dǎo)體晶圓的機(jī)械手。具體地,該機(jī)械手將半導(dǎo)體晶圓插入到處理室(process chamber),或者將半導(dǎo)體晶圓從處理室中取出。傳送室(transfer chamber)連結(jié)于處理室。機(jī)械手配置在該傳送室內(nèi)。利用機(jī)械手使半導(dǎo)體晶圓在傳送室與處理室之間移動(dòng)。傳送室相當(dāng)于小的無(wú)塵室。傳送室防止灰塵等雜質(zhì)附著于半導(dǎo)體晶圓。在傳送室內(nèi)保持空氣(或者氣體)清潔。另外,傳送室內(nèi)有時(shí)被保持為真空。要求使在傳送室內(nèi)工作的機(jī)械手不產(chǎn)生雜質(zhì)的方法。機(jī)械手臂根據(jù)結(jié)構(gòu)形式的不同分為多關(guān)節(jié)機(jī)械手臂.無(wú)錫進(jìn)口晶圓運(yùn)送機(jī)械吸臂維修自動(dòng)化方面,機(jī)械吸臂將與其他半導(dǎo)體制造設(shè)備和自動(dòng)化生產(chǎn)線實(shí)現(xiàn)更緊密的集成,實(shí)現(xiàn)整個(gè)生...
2025-06-06 -
 江蘇正規(guī)晶圓運(yùn)送機(jī)械吸臂哪里好
江蘇正規(guī)晶圓運(yùn)送機(jī)械吸臂哪里好有用于輸送半導(dǎo)體晶圓的機(jī)械手。具體地,該機(jī)械手將半導(dǎo)體晶圓插入到處理室(process chamber),或者將半導(dǎo)體晶圓從處理室中取出。傳送室(transfer chamber)連結(jié)于處理室。機(jī)械手配置在該傳送室內(nèi)。利用機(jī)械手使半導(dǎo)體晶圓在傳送室與處理室之間移動(dòng)。傳送室相當(dāng)于小的無(wú)塵室。傳送室防止灰塵等雜質(zhì)附著于半導(dǎo)體晶圓。在傳送室內(nèi)保持空氣(或者氣體)清潔。另外,傳送室內(nèi)有時(shí)被保持為真空。要求使在傳送室內(nèi)工作的機(jī)械手不產(chǎn)生雜質(zhì)的方法。機(jī)械手是能模仿人手和臂的某些動(dòng)作功能,用以按固定程序抓取、搬運(yùn)物件或操作工具的自動(dòng)操作裝置。江蘇正規(guī)晶圓運(yùn)送機(jī)械吸臂哪里好裝配機(jī)械人 ;這燈機(jī)械臂要有較高的位...
2025-06-05 -
 福建正規(guī)晶圓運(yùn)送機(jī)械吸臂什么價(jià)格
福建正規(guī)晶圓運(yùn)送機(jī)械吸臂什么價(jià)格與傳統(tǒng)的SCARA型搬運(yùn)機(jī)械手相比,蛙腿型機(jī)械手的傳動(dòng)機(jī)構(gòu)更簡(jiǎn)單,剛性更高,且工作效率更高。如上圖所示,蛙腿型機(jī)械手手臂為對(duì)稱雙連桿的并聯(lián)結(jié)構(gòu),包括1對(duì)大臂和2對(duì)小臂。2個(gè)直驅(qū)電機(jī)分別通過(guò)2個(gè)同軸的旋轉(zhuǎn)軸連接大臂,大臂末端通過(guò)4個(gè)旋轉(zhuǎn)軸連接尺寸相同的2對(duì)小臂,2對(duì)小臂的末端又通過(guò)2個(gè)旋轉(zhuǎn)軸連接晶圓托盤(pán)。 該機(jī)械手雖然只有3個(gè)電機(jī),但水平連桿卻有10個(gè)旋轉(zhuǎn)關(guān)節(jié),因此對(duì)整個(gè)真空機(jī)械手建立旋轉(zhuǎn)關(guān)節(jié)坐標(biāo)與末端晶圓托盤(pán)坐標(biāo)之間的函數(shù)關(guān)系是一個(gè)復(fù)雜的過(guò)程工業(yè)機(jī)械臂距離高精度的智能制造還有很長(zhǎng)一段路要走。福建正規(guī)晶圓運(yùn)送機(jī)械吸臂什么價(jià)格 工業(yè)機(jī)械臂定義為“其操作機(jī)是自動(dòng)控制的,可重復(fù)編程、多用途,并可以對(duì)...
2025-06-05 -
 茂名新款晶圓運(yùn)送機(jī)械吸臂聯(lián)系人
茂名新款晶圓運(yùn)送機(jī)械吸臂聯(lián)系人半導(dǎo)體晶圓有時(shí)在處理室內(nèi)暴露在高溫中。因此,機(jī)械手有時(shí)輸送高溫的半導(dǎo)體晶圓。若高溫的半導(dǎo)體晶圓與手部接觸,則手部的溫度上升,并且配置在前臂連桿與手部之間的關(guān)節(jié)的溫度也上升。由此,安裝于關(guān)節(jié)的軸承的溫度上升。軸承的溫度上升促進(jìn)該軸承內(nèi)的潤(rùn)滑劑的劣化。因此,與配置在上臂連桿與前臂連桿之間的關(guān)節(jié)的軸承相比,配置在前臂連桿和手部之間的關(guān)節(jié)的軸承的維護(hù)頻率較高。 晶圓是指硅半導(dǎo)體集成電路制作所用的硅晶片,由于其形狀為圓形,故稱為晶圓;在硅晶片上可加工制作成各種電路元件結(jié)構(gòu),而成為有特定電性功能的集成電路產(chǎn)品。 晶圓的原始材料是硅,而地殼表面有用之不竭的二氧化硅。二氧化硅礦石經(jīng)由電弧爐提煉,鹽酸...
2025-06-05 -
浙江晶圓運(yùn)送機(jī)械吸臂推廣
晶圓運(yùn)送機(jī)械吸臂在半導(dǎo)體制造中具有不可替代的重要性。首先,它是保證半導(dǎo)體生產(chǎn)線高效運(yùn)行的關(guān)鍵環(huán)節(jié)。在半導(dǎo)體制造過(guò)程中,晶圓需要經(jīng)過(guò)多個(gè)工序的加工,如光刻、刻蝕、沉積、摻雜等,每個(gè)工序都在不同的設(shè)備上進(jìn)行。機(jī)械吸臂能夠快速、準(zhǔn)確地將晶圓在各個(gè)設(shè)備之間進(jìn)行搬運(yùn),減少了晶圓在生產(chǎn)線上的停留時(shí)間,提高了生產(chǎn)效率。如果吸臂的性能不穩(wěn)定或出現(xiàn)故障,將會(huì)導(dǎo)致生產(chǎn)線的停頓,嚴(yán)重影響生產(chǎn)進(jìn)度和產(chǎn)量。晶圓運(yùn)送機(jī)械吸臂的不斷發(fā)展和創(chuàng)新是推動(dòng)半導(dǎo)體制造技術(shù)進(jìn)步的重要?jiǎng)恿χ弧S蠿移動(dòng),Y移動(dòng),Z移動(dòng),X轉(zhuǎn)動(dòng),Y轉(zhuǎn)動(dòng),Z轉(zhuǎn)動(dòng)六個(gè)自由度組成。浙江晶圓運(yùn)送機(jī)械吸臂推廣 隨著機(jī)器人技術(shù)的發(fā)展,應(yīng)用高速度、高精度、高負(fù)載自重...
2025-06-05 -
蘇州新款晶圓運(yùn)送機(jī)械吸臂批發(fā)
晶圓運(yùn)送機(jī)械吸臂是半導(dǎo)體制造過(guò)程中不可或缺的重要設(shè)備之一。它主要用于將晶圓從一個(gè)工序轉(zhuǎn)移到另一個(gè)工序,確保晶圓在整個(gè)制造過(guò)程中的安全和穩(wěn)定運(yùn)輸。 晶圓運(yùn)送機(jī)械吸臂具有高度的自動(dòng)化和精確性。它采用先進(jìn)的自動(dòng)控制系統(tǒng),能夠準(zhǔn)確地定位和抓取晶圓,避免了人為操作的誤差和不穩(wěn)定性。通過(guò)精確的控制,晶圓可以在不同工序之間快速而安全地轉(zhuǎn)移,提高了生產(chǎn)效率和產(chǎn)品質(zhì)量。其次,晶圓運(yùn)送機(jī)械吸臂具有高度的可靠性和穩(wěn)定性。它采用了質(zhì)量高的材料和先進(jìn)的制造工藝,具有良好的耐磨性和抗腐蝕性。同時(shí),晶圓運(yùn)送機(jī)械吸臂經(jīng)過(guò)嚴(yán)格的測(cè)試和檢驗(yàn),確保其在長(zhǎng)時(shí)間運(yùn)行中不會(huì)出現(xiàn)故障或損壞,保證了生產(chǎn)線的連續(xù)性和穩(wěn)定性。 臂應(yīng)承...
2025-06-04 -
 安徽官方晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇
安徽官方晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家怎么選擇受歐美股指隔夜再度全線殺跌的影響,兩市**小幅低開(kāi),低開(kāi)后的市場(chǎng)在抄底盤(pán)和北上資金的推動(dòng)下震蕩走高,早間收盤(pán)全線收漲,午后在科技板塊的帶動(dòng)下市場(chǎng)繼續(xù)震蕩走高,**終兩市**以中陽(yáng)報(bào)收。 昨天談到農(nóng)業(yè)、大消費(fèi)和科技股目前呈現(xiàn)出蹺蹺板的態(tài)勢(shì),果不其然***出現(xiàn)了此消彼長(zhǎng)的情形。 盤(pán)面上看,市場(chǎng)***科技股再度走強(qiáng),以大基金持有的科技股繼續(xù)**著相關(guān)題材概念和板塊進(jìn)行做多,北上資金***依舊大幅凈流入,市場(chǎng)短期做多的因素和動(dòng)能正在疊加。 盤(pán)后出了條消息,“中方不會(huì)坐視不理美科技霸凌主義”,先機(jī)哥由此猜測(cè)市場(chǎng)短期的反彈將還是延著科技股...
2025-06-04 -
 山東原裝晶圓運(yùn)送機(jī)械吸臂公司
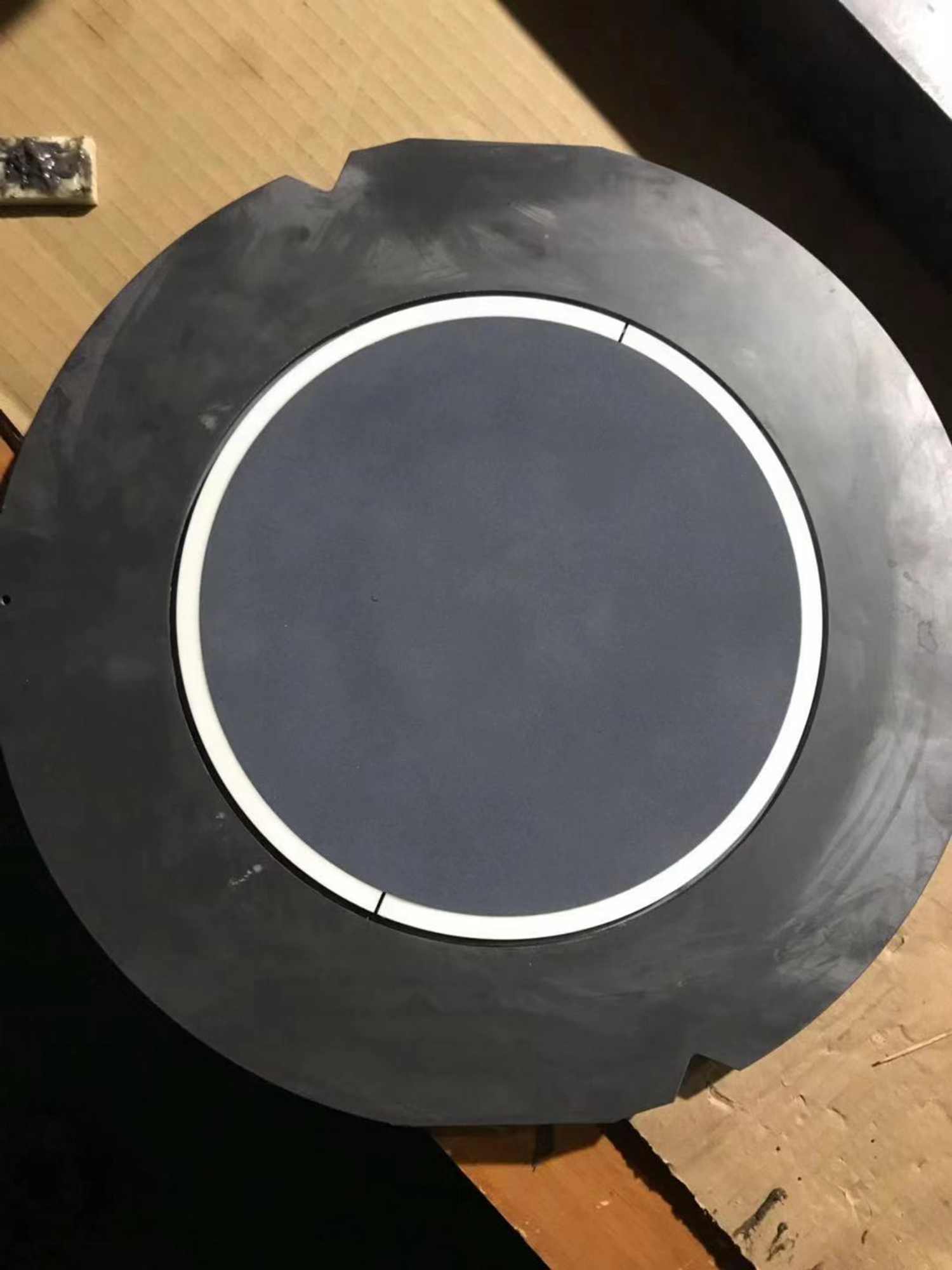
山東原裝晶圓運(yùn)送機(jī)械吸臂公司為圓柱的單晶硅晶錠更便于運(yùn)輸,有效的避免了在運(yùn)輸途中磕碰損壞,邊角碎掉什么的造成材料損耗。而且,請(qǐng)仔細(xì)回想一下,你看到的晶圓是完全的圓的嗎?非也!在硅棒做出來(lái)后,在200mm以下的硅棒上是切割一個(gè)平角,叫Flat。在200mm(含)以上硅棒上,為了減少浪費(fèi),只裁剪個(gè)圓形小口,叫做Notch。***再進(jìn)行切片,得到的晶圓如下。那么,這個(gè)小豁口是做什么用的呢?很容易想到——定位。這樣每片晶圓的晶向就能確定,在加工的時(shí)候也不容易出錯(cuò)了。所以,為什么“晶圓”沒(méi)有方的???答案很簡(jiǎn)單,是一個(gè)歷史遺留的問(wèn)題,也是一個(gè)技術(shù)限制的問(wèn)題。而且,真的沒(méi)有必要做出來(lái)正方的硅片呢~。 機(jī)械手的運(yùn)動(dòng)速度一般...
2025-06-04 -
 惠州原裝晶圓運(yùn)送機(jī)械吸臂賣價(jià)
惠州原裝晶圓運(yùn)送機(jī)械吸臂賣價(jià)晶圓運(yùn)送機(jī)械吸臂是一種用于半導(dǎo)體行業(yè)的關(guān)鍵設(shè)備,主要用于將晶圓從一個(gè)工序轉(zhuǎn)移到另一個(gè)工序。它的主要功能是通過(guò)吸盤(pán)將晶圓吸附在機(jī)械臂上,然后將其準(zhǔn)確地運(yùn)送到目標(biāo)位置。晶圓運(yùn)送機(jī)械吸臂在半導(dǎo)體生產(chǎn)過(guò)程中起到了至關(guān)重要的作用,它不僅能夠提高生產(chǎn)效率,還能夠保證產(chǎn)品質(zhì)量和生產(chǎn)安全。 晶圓運(yùn)送機(jī)械吸臂在半導(dǎo)體行業(yè)中扮演著重要的角色。它的應(yīng)用范圍廣,能夠滿足不同工序的晶圓運(yùn)輸需求。晶圓運(yùn)送機(jī)械吸臂的高精度、高速度和穩(wěn)定性能,能夠提高生產(chǎn)效率,保證產(chǎn)品質(zhì)量和生產(chǎn)安全。 科學(xué)家已經(jīng)研制出了橡膠機(jī)器手臂,可以抓起螞蟻而不是捏死。惠州原裝晶圓運(yùn)送機(jī)械吸臂賣價(jià)工業(yè)機(jī)械臂是擬人手臂、手腕和手功能 的機(jī)械電子...
2025-06-03 -
汕尾晶圓運(yùn)送機(jī)械吸臂代理
與剛性機(jī)械臂相比較,柔性機(jī)械臂具有結(jié)構(gòu)輕、載重/自重比高等特性,因而具有較低的能耗、較大的操作空間和很高的效率,其響應(yīng)快速而準(zhǔn)確,有著很多潛在的優(yōu)點(diǎn),在工業(yè)、**等應(yīng)用領(lǐng)域中占有十分重要的地位。隨著宇航業(yè)及機(jī)器人業(yè)的飛速發(fā)展,越來(lái)越多地采用由若干個(gè)柔性構(gòu)件組成的多柔體系統(tǒng)。傳統(tǒng)的多剛體動(dòng)力學(xué)的分析方法及控制方法已不能滿足多柔體系統(tǒng)的動(dòng)力分析及控制的要求。柔性機(jī)械臂作為簡(jiǎn)單的非平凡多柔體系統(tǒng),被用作多柔體系統(tǒng)的研究模型。 普遍認(rèn)為機(jī)械臂是實(shí)現(xiàn)智能制造的很好的載體,可以實(shí)現(xiàn)五軸數(shù)控?zé)o法實(shí)現(xiàn)的大操作空間與靈活性。汕尾晶圓運(yùn)送機(jī)械吸臂代理它通常有幾個(gè)自由度,用以抓取或移動(dòng)物體(工具或工件)。”所以...
2025-06-03 -
 蘇州新款晶圓運(yùn)送機(jī)械吸臂市場(chǎng)價(jià)
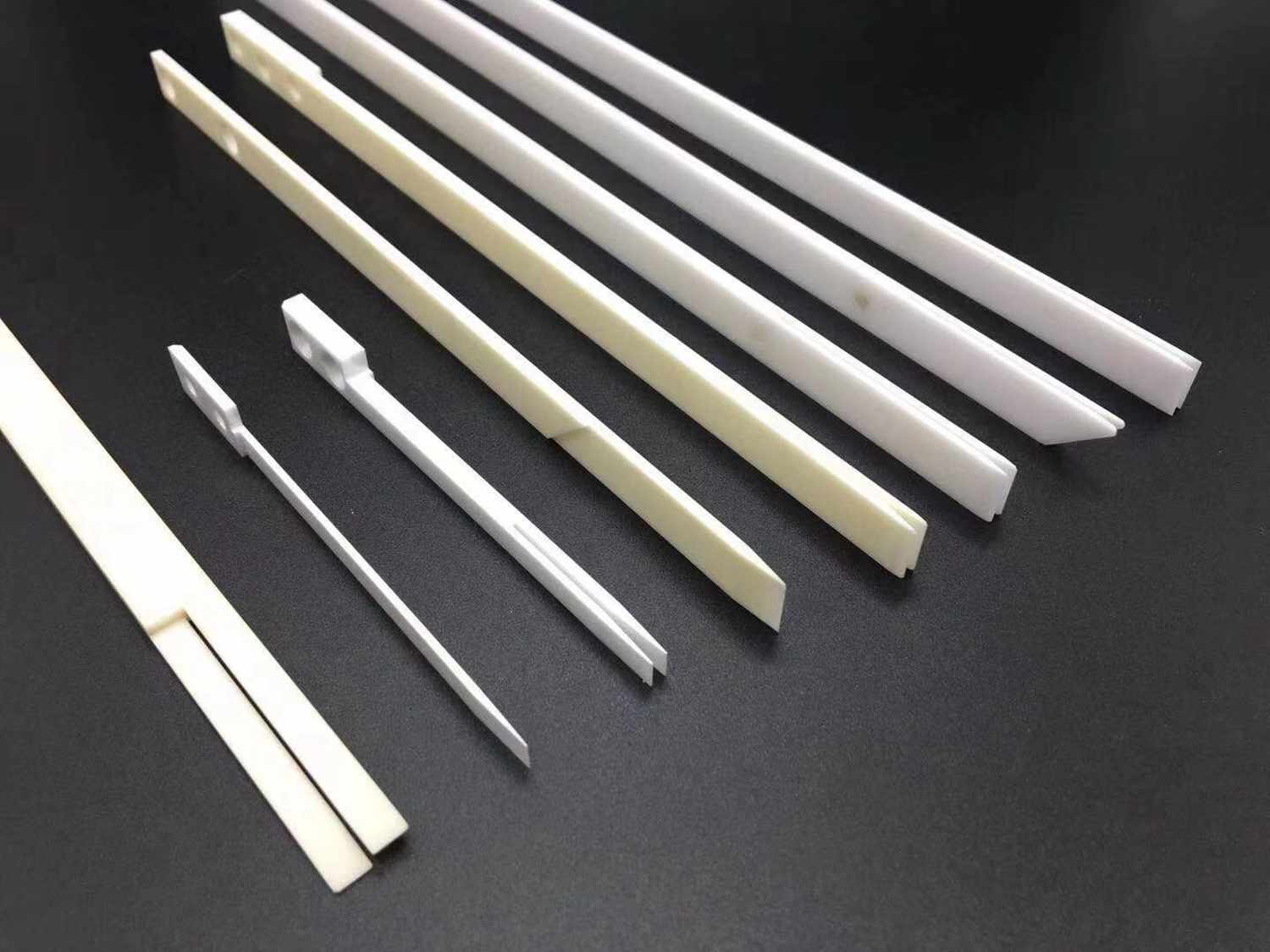
蘇州新款晶圓運(yùn)送機(jī)械吸臂市場(chǎng)價(jià)本發(fā)明針對(duì)現(xiàn)有技術(shù)中的不足,提供了一種晶圓搬運(yùn)機(jī)械手,本發(fā)明的機(jī)械手在傳送過(guò)程中晶片中心始終保證直線運(yùn)動(dòng),且角度不會(huì)發(fā)生改變。從而提高機(jī)械手整體剛度和承重能力,同時(shí)提高了重復(fù)定位精度。本發(fā)明結(jié)構(gòu)合理性能穩(wěn)定,維護(hù)方便,多功能集一身,可滿足多種工藝設(shè)備要求,適用于各種半導(dǎo)體設(shè)備。 為了解決上述技術(shù)問(wèn)題,本發(fā)明通過(guò)下述技術(shù)方案得以解決:一種晶圓搬運(yùn)機(jī)械手,包括升降軸、旋轉(zhuǎn)軸和伸展軸,其特征為,所述的伸展軸包括伸展電機(jī)、一級(jí)伸展臂、二級(jí)伸展臂和手指固定座,所述的一級(jí)伸展臂與所述伸展電機(jī)之間設(shè)置有一級(jí)關(guān)節(jié),所述的一級(jí)伸展臂與所述的二級(jí)伸展臂之間設(shè)置有二級(jí)關(guān)節(jié),所述的二級(jí)伸展臂...
2025-06-03 -
安徽新款晶圓運(yùn)送機(jī)械吸臂廠商
晶圓作為半導(dǎo)體芯片的關(guān)鍵材料,其表面質(zhì)量和完整性直接決定了芯片的性能和可靠性。機(jī)械吸臂在搬運(yùn)晶圓過(guò)程中,必須要保證晶圓不受任何損傷和污染。任何微小的劃痕、顆粒污染或靜電放電都可能導(dǎo)致晶圓報(bào)廢,從而增加生產(chǎn)成本。因此,高精度、高可靠性的機(jī)械吸臂是確保晶圓質(zhì)量和成品率的重要保障。此外,隨著半導(dǎo)體技術(shù)的不斷發(fā)展,芯片制造工藝越來(lái)越復(fù)雜,晶圓尺寸也不斷增大,對(duì)晶圓搬運(yùn)的精度和穩(wěn)定性要求也越來(lái)越高。例如,在先進(jìn)的集成電路制造工藝中,晶圓的線寬已經(jīng)達(dá)到納米級(jí)別,這就要求機(jī)械吸臂在搬運(yùn)晶圓時(shí)的定位精度要達(dá)到亞微米甚至更高的級(jí)別。主要代替人工從事場(chǎng)景危險(xiǎn)的工作或者是代替密集型、重復(fù)性高的動(dòng)作。安徽新款晶圓運(yùn)送...
2025-06-03 -
 梅州晶圓運(yùn)送機(jī)械吸臂工廠
梅州晶圓運(yùn)送機(jī)械吸臂工廠傳感系統(tǒng)是晶圓運(yùn)送機(jī)械吸臂實(shí)現(xiàn)精確操作的關(guān)鍵。它猶如吸臂的“眼睛”和“神經(jīng)”,實(shí)時(shí)監(jiān)測(cè)吸臂的位置、姿態(tài)以及晶圓的狀態(tài),為控制系統(tǒng)提供準(zhǔn)確的數(shù)據(jù)反饋。在位置和姿態(tài)檢測(cè)方面,通常采用高精度的編碼器、陀螺儀和激光傳感器等。編碼器可以精確測(cè)量吸臂關(guān)節(jié)的旋轉(zhuǎn)角度和直線位移,從而確定吸臂在空間中的位置坐標(biāo)。陀螺儀則用于監(jiān)測(cè)吸臂的旋轉(zhuǎn)速度和方向變化,幫助控制系統(tǒng)實(shí)時(shí)調(diào)整運(yùn)動(dòng)姿態(tài),確保吸臂的運(yùn)動(dòng)平穩(wěn)和準(zhǔn)確。激光傳感器可以對(duì)周圍環(huán)境進(jìn)行掃描和測(cè)距,輔助吸臂在復(fù)雜的工作場(chǎng)景中避開(kāi)障礙物,實(shí)現(xiàn)安全的晶圓搬運(yùn)。手臂的運(yùn)動(dòng)速度要適當(dāng),慣性要小.梅州晶圓運(yùn)送機(jī)械吸臂工廠 割拋光: 單晶棒將按適當(dāng)?shù)某叽邕M(jìn)行切割,然...
2025-06-03 -
江蘇原裝晶圓運(yùn)送機(jī)械吸臂公司
半導(dǎo)體晶圓有時(shí)在處理室內(nèi)暴露在高溫中。因此,機(jī)械手有時(shí)輸送高溫的半導(dǎo)體晶圓。若高溫的半導(dǎo)體晶圓與手部接觸,則手部的溫度上升,并且配置在前臂連桿與手部之間的關(guān)節(jié)的溫度也上升。由此,安裝于關(guān)節(jié)的軸承的溫度上升。軸承的溫度上升促進(jìn)該軸承內(nèi)的潤(rùn)滑劑的劣化。因此,與配置在上臂連桿與前臂連桿之間的關(guān)節(jié)的軸承相比,配置在前臂連桿和手部之間的關(guān)節(jié)的軸承的維護(hù)頻率較高。 晶圓是指硅半導(dǎo)體集成電路制作所用的硅晶片,由于其形狀為圓形,故稱為晶圓;在硅晶片上可加工制作成各種電路元件結(jié)構(gòu),而成為有特定電性功能的集成電路產(chǎn)品。 晶圓的原始材料是硅,而地殼表面有用之不竭的二氧化硅。二氧化硅礦石經(jīng)由電弧爐提煉,鹽酸...
2025-06-03 -
 浙江官方晶圓運(yùn)送機(jī)械吸臂參考價(jià)
浙江官方晶圓運(yùn)送機(jī)械吸臂參考價(jià)晶圓作為半導(dǎo)體芯片的關(guān)鍵材料,其表面質(zhì)量和完整性直接決定了芯片的性能和可靠性。機(jī)械吸臂在搬運(yùn)晶圓過(guò)程中,必須要保證晶圓不受任何損傷和污染。任何微小的劃痕、顆粒污染或靜電放電都可能導(dǎo)致晶圓報(bào)廢,從而增加生產(chǎn)成本。因此,高精度、高可靠性的機(jī)械吸臂是確保晶圓質(zhì)量和成品率的重要保障。此外,隨著半導(dǎo)體技術(shù)的不斷發(fā)展,芯片制造工藝越來(lái)越復(fù)雜,晶圓尺寸也不斷增大,對(duì)晶圓搬運(yùn)的精度和穩(wěn)定性要求也越來(lái)越高。例如,在先進(jìn)的集成電路制造工藝中,晶圓的線寬已經(jīng)達(dá)到納米級(jí)別,這就要求機(jī)械吸臂在搬運(yùn)晶圓時(shí)的定位精度要達(dá)到亞微米甚至更高的級(jí)別。關(guān)節(jié)式機(jī)械手因其結(jié)構(gòu)復(fù)雜。浙江官方晶圓運(yùn)送機(jī)械吸臂參考價(jià) 半導(dǎo)體行業(yè),尤其是集...
2025-06-02 -
 云浮新款晶圓運(yùn)送機(jī)械吸臂維修
云浮新款晶圓運(yùn)送機(jī)械吸臂維修例如:尋找,運(yùn)輸,握取,對(duì)準(zhǔn),裝配,檢驗(yàn)等動(dòng)作. 為了明確地描述工業(yè)機(jī)械人,美國(guó)機(jī)械人協(xié)會(huì)在1979年將機(jī)械人定義為一個(gè)可用程式控制,多功能的操作器,它透過(guò)程式控制和多變化的動(dòng)作設(shè)計(jì)來(lái)移動(dòng)材料,工件,工具或特別設(shè)備,以完成一連串的工作.所以,雖然許多工業(yè)機(jī)械人并非有人的形態(tài),但只要它們符合機(jī)械人的定義,便可以稱為機(jī)械人.工業(yè)機(jī)械人雖然已被廣泛應(yīng)用在多種制造行業(yè)內(nèi),但估計(jì)在不久將來(lái)還會(huì)有數(shù)以十萬(wàn)計(jì)的工業(yè)機(jī)械人投入服務(wù).現(xiàn)時(shí),不少研究人員正為機(jī)械人研究如何加入視覺(jué)和感覺(jué),令機(jī)械人可以完成更復(fù)雜的工作.而研究機(jī)械人的學(xué)問(wèn)稱為機(jī)械人學(xué)。機(jī)械手是能模仿人手和臂的某些動(dòng)作功能,用以按固定程序抓取、搬運(yùn)物件...
2025-06-02 -
 湛江晶圓運(yùn)送機(jī)械吸臂廠商
湛江晶圓運(yùn)送機(jī)械吸臂廠商隨著智能工業(yè)的快速發(fā)展,我們?cè)絹?lái)越多的行業(yè)都使用了工業(yè)機(jī)器人代替人工作業(yè),那么我們來(lái)說(shuō)說(shuō)工業(yè)機(jī)器人如六軸機(jī)器人是怎樣的? 六軸工業(yè)機(jī)器人是一種用于自然科學(xué)相關(guān)工程與技術(shù)領(lǐng)域的工藝試驗(yàn)儀器,六軸機(jī)器人的六個(gè)軸,每個(gè)軸都是一個(gè)電機(jī)配備減速機(jī)來(lái)傳動(dòng),各個(gè)軸的運(yùn)動(dòng)方式和方向都不同,每個(gè)軸其實(shí)是模擬人手的各個(gè)關(guān)節(jié)的動(dòng)作。 一軸:一軸是連接底座的部位,主要是承載上面軸的重量與底座的左右旋轉(zhuǎn),一個(gè)左右旋轉(zhuǎn)的動(dòng)作就是使用電機(jī)與減速機(jī)傳動(dòng)的結(jié)果,每個(gè)軸都是代替一個(gè)方向的運(yùn)動(dòng)方式。 二軸:控制機(jī)器人主臂的前后擺動(dòng)、整個(gè)主臂上下運(yùn)動(dòng)的功能。 三軸:三軸同樣是控制機(jī)器人前后擺動(dòng)功能,只是比第二軸...
2025-06-02 -
 無(wú)錫進(jìn)口晶圓運(yùn)送機(jī)械吸臂企業(yè)
無(wú)錫進(jìn)口晶圓運(yùn)送機(jī)械吸臂企業(yè)工業(yè)機(jī)械臂是擬人手臂、手腕和手功能 的機(jī)械電子裝置。擬人手臂、手腕和手功能的機(jī)械電子裝置;它可把任一物件或工具按空間位姿(位置和姿態(tài))的時(shí)變要求進(jìn)行移動(dòng),從而完成某一工業(yè)生產(chǎn)的作業(yè)要求。如夾持焊鉗或焊***,對(duì)汽車或摩托車車體進(jìn)行了點(diǎn)焊或弧焊;搬運(yùn)壓鑄或沖壓成型的零件或構(gòu)件;進(jìn)行激光切割;噴涂;裝配機(jī)械零部件等等。機(jī)械臂是“ROBOT”一詞的中文譯名。由于影視宣傳和科幻小說(shuō)的影響,人們往往把機(jī)械臂想像成外貌似人的機(jī)械和電子裝置。但事實(shí)并不是這樣,特別是工業(yè)機(jī)械臂,與人的外貌往往毫無(wú)相似之處。根據(jù)國(guó)家標(biāo)準(zhǔn),工業(yè)機(jī)械臂定義為“其操作機(jī)是自動(dòng)控制的,可重復(fù)編程、多用途,并可以對(duì)3個(gè)以上軸進(jìn)行編程。它...
2025-06-02 -
肇慶晶圓運(yùn)送機(jī)械吸臂價(jià)格便宜
工業(yè)機(jī)械臂是擬人手臂、手腕和手功能 的機(jī)械電子裝置。擬人手臂、手腕和手功能的機(jī)械電子裝置;它可把任一物件或工具按空間位姿(位置和姿態(tài))的時(shí)變要求進(jìn)行移動(dòng),從而完成某一工業(yè)生產(chǎn)的作業(yè)要求。如夾持焊鉗或焊***,對(duì)汽車或摩托車車體進(jìn)行了點(diǎn)焊或弧焊;搬運(yùn)壓鑄或沖壓成型的零件或構(gòu)件;進(jìn)行激光切割;噴涂;裝配機(jī)械零部件等等。機(jī)械臂是“ROBOT”一詞的中文譯名。由于影視宣傳和科幻小說(shuō)的影響,人們往往把機(jī)械臂想像成外貌似人的機(jī)械和電子裝置。但事實(shí)并不是這樣,特別是工業(yè)機(jī)械臂,與人的外貌往往毫無(wú)相似之處。根據(jù)國(guó)家標(biāo)準(zhǔn),工業(yè)機(jī)械臂定義為“其操作機(jī)是自動(dòng)控制的,可重復(fù)編程、多用途,并可以對(duì)3個(gè)以上軸進(jìn)行編程。它...
2025-06-01 -
 湛江原裝晶圓運(yùn)送機(jī)械吸臂價(jià)位
湛江原裝晶圓運(yùn)送機(jī)械吸臂價(jià)位與剛性機(jī)械臂相比較,柔性機(jī)械臂具有結(jié)構(gòu)輕、載重/自重比高等特性,因而具有較低的能耗、較大的操作空間和很高的效率,其響應(yīng)快速而準(zhǔn)確,有著很多潛在的優(yōu)點(diǎn),在工業(yè)、**等應(yīng)用領(lǐng)域中占有十分重要的地位。隨著宇航業(yè)及機(jī)器人業(yè)的飛速發(fā)展,越來(lái)越多地采用由若干個(gè)柔性構(gòu)件組成的多柔體系統(tǒng)。傳統(tǒng)的多剛體動(dòng)力學(xué)的分析方法及控制方法已不能滿足多柔體系統(tǒng)的動(dòng)力分析及控制的要求。柔性機(jī)械臂作為簡(jiǎn)單的非平凡多柔體系統(tǒng),被用作多柔體系統(tǒng)的研究模型。 一般也都裝在手臂上。所以手臂的結(jié)構(gòu)、工作范圍、承載能力和動(dòng)作精度都直接影響機(jī)械手的工作性能。湛江原裝晶圓運(yùn)送機(jī)械吸臂價(jià)位 晶圓運(yùn)送機(jī)械吸臂的高速度和高精度,能夠滿足封裝和...
2025-06-01 -
揭陽(yáng)進(jìn)口晶圓運(yùn)送機(jī)械吸臂工廠
隨著人工智能、物聯(lián)網(wǎng)和自動(dòng)化技術(shù)的快速發(fā)展,晶圓運(yùn)送機(jī)械吸臂也呈現(xiàn)出智能化、自動(dòng)化和網(wǎng)絡(luò)化的發(fā)展趨勢(shì)。智能化方面,吸臂將集成更多的智能傳感器和算法,實(shí)現(xiàn)自主感知、決策和控制。例如,通過(guò)機(jī)器學(xué)習(xí)算法對(duì)吸臂的運(yùn)行數(shù)據(jù)進(jìn)行分析和優(yōu)化,能夠提前判斷預(yù)測(cè)潛在的故障風(fēng)險(xiǎn),并自動(dòng)調(diào)整運(yùn)行參數(shù),提高吸臂的性能和可靠性。同時(shí),智能吸臂還可以根據(jù)晶圓的不同類型和加工工藝要求,自動(dòng)調(diào)整搬運(yùn)策略和參數(shù),實(shí)現(xiàn)個(gè)性化的晶圓搬運(yùn)服務(wù)。手臂自重輕,其啟動(dòng)和停止的平穩(wěn)性就好。揭陽(yáng)進(jìn)口晶圓運(yùn)送機(jī)械吸臂工廠 晶圓運(yùn)送機(jī)械吸臂的高速度和高精度,能夠滿足封裝和測(cè)試過(guò)程中對(duì)運(yùn)輸速度和精度的要求。光刻和薄膜沉積:在光刻和薄膜沉積過(guò)程中,...
2025-06-01 -
 陽(yáng)江官方晶圓運(yùn)送機(jī)械吸臂廠商
陽(yáng)江官方晶圓運(yùn)送機(jī)械吸臂廠商輸送半導(dǎo)體晶圓的機(jī)械手通常具有兩個(gè)以上的自由度。這種機(jī)械手典型地由兩個(gè)連桿和手部構(gòu)成。在本說(shuō)明書(shū)中,將兩個(gè)連桿稱作上臂連桿和前臂連桿。典型地,上臂連桿的一端連結(jié)于電機(jī)的輸出軸,上臂連桿的另一端連結(jié)于前臂連桿的一端。而且,前臂連桿的另一端連結(jié)于手部。上臂連桿和前臂連桿經(jīng)由關(guān)節(jié)而連結(jié)。前臂連桿和手部也經(jīng)由關(guān)節(jié)而連結(jié)。在各個(gè)關(guān)節(jié)處安裝有軸承,以便使連桿順暢地旋轉(zhuǎn)。在輸送半導(dǎo)體晶圓的機(jī)械手中,為了不污染傳送室內(nèi)而屏蔽(shield)安裝于關(guān)節(jié)的軸承。吸臂采用靜電除塵技術(shù),保證晶圓表面的清潔度。陽(yáng)江官方晶圓運(yùn)送機(jī)械吸臂廠商 割拋光: 單晶棒將按適當(dāng)?shù)某叽邕M(jìn)行切割,然后進(jìn)行研磨,將凹凸的切痕磨掉,...
2025-06-01 -
 陽(yáng)江官方晶圓運(yùn)送機(jī)械吸臂賣價(jià)
陽(yáng)江官方晶圓運(yùn)送機(jī)械吸臂賣價(jià)例如:尋找,運(yùn)輸,握取,對(duì)準(zhǔn),裝配,檢驗(yàn)等動(dòng)作. 為了明確地描述工業(yè)機(jī)械人,美國(guó)機(jī)械人協(xié)會(huì)在1979年將機(jī)械人定義為一個(gè)可用程式控制,多功能的操作器,它透過(guò)程式控制和多變化的動(dòng)作設(shè)計(jì)來(lái)移動(dòng)材料,工件,工具或特別設(shè)備,以完成一連串的工作.所以,雖然許多工業(yè)機(jī)械人并非有人的形態(tài),但只要它們符合機(jī)械人的定義,便可以稱為機(jī)械人.工業(yè)機(jī)械人雖然已被廣泛應(yīng)用在多種制造行業(yè)內(nèi),但估計(jì)在不久將來(lái)還會(huì)有數(shù)以十萬(wàn)計(jì)的工業(yè)機(jī)械人投入服務(wù).現(xiàn)時(shí),不少研究人員正為機(jī)械人研究如何加入視覺(jué)和感覺(jué),令機(jī)械人可以完成更復(fù)雜的工作.而研究機(jī)械人的學(xué)問(wèn)稱為機(jī)械人學(xué)。手臂的結(jié)構(gòu)要緊湊小巧,才能做手臂運(yùn)動(dòng)輕快、靈活。陽(yáng)江官方晶圓運(yùn)送機(jī)...
2025-06-01 -
江門(mén)晶圓運(yùn)送機(jī)械吸臂上門(mén)服務(wù)
研究背景近年來(lái),隨著機(jī)器人技術(shù)的發(fā)展,應(yīng)用高速度、高精度、 高負(fù)載自重比的機(jī)器人結(jié)構(gòu)受到工業(yè)和航空航天領(lǐng)域的關(guān)注。由于運(yùn)動(dòng)過(guò)程中關(guān)節(jié)和連桿的柔性效應(yīng)的增加,使結(jié)構(gòu)發(fā)生變形從而使任務(wù)執(zhí)行的精度降低。所以,機(jī)器人機(jī)械臂結(jié)構(gòu)柔性特征必須予以考慮,實(shí)現(xiàn)柔性機(jī)械臂高精度有效控制也必須考慮系統(tǒng)動(dòng)力學(xué)特性。柔性機(jī)械臂是一個(gè)非常復(fù)雜的動(dòng)力學(xué)系統(tǒng),其動(dòng)力學(xué)方程具有非線性, 強(qiáng)耦合, 實(shí)變等特點(diǎn)。而進(jìn)行柔性臂動(dòng)力學(xué)問(wèn)題的研究,其模型的建立是極其重要的。柔性機(jī)械臂不僅是一個(gè)剛?cè)狁詈系姆蔷€性系統(tǒng),而且也是系統(tǒng)動(dòng)力學(xué)特性與控制特性相互耦合即機(jī)電耦合的非線性系統(tǒng)。動(dòng)力學(xué)建模的目的是為控制系統(tǒng)描述及控制器設(shè)計(jì)提供依據(jù)。一般...
2025-06-01 -
清遠(yuǎn)新款晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家
多功能一體化機(jī)械臂,包括機(jī)械臂主體,所述機(jī)械臂主體由設(shè)置在該機(jī)械臂主體底部的底座、設(shè)置在底座頂部的后臂及設(shè)置在后臂頂部的前臂構(gòu)成的,該種多功能一體化機(jī)械臂,改進(jìn)了原有產(chǎn)品的缺點(diǎn),本實(shí)用新型多功能一體化機(jī)械臂具有成本費(fèi)用較低、占地面積較小和驅(qū)動(dòng)充足的特點(diǎn),本機(jī)械臂*由底座、前臂和后臂構(gòu)成的,實(shí)現(xiàn)了占地面積小的特點(diǎn),且在生產(chǎn)過(guò)程中由于體積較小,廠家生產(chǎn)成本費(fèi)較低,同時(shí)工人在使用時(shí),移動(dòng)較為方便,設(shè)有的安全離合器、液壓器和液壓室,實(shí)現(xiàn)了本新型機(jī)械臂驅(qū)動(dòng)充足的特點(diǎn),在使用過(guò)程中完全依靠程序芯片控制,液壓器液壓精細(xì)不會(huì)車床行業(yè)機(jī)械臂又名車床自動(dòng)上下料機(jī)械手、上下料機(jī)械手。清遠(yuǎn)新款晶圓運(yùn)送機(jī)械吸臂生產(chǎn)廠家...
2025-05-31 -
 茂名晶圓運(yùn)送機(jī)械吸臂廠商
茂名晶圓運(yùn)送機(jī)械吸臂廠商晶圓是半導(dǎo)體行業(yè)的關(guān)鍵元件,隨著半導(dǎo)體行業(yè)的迅速發(fā)展,晶圓的搬運(yùn)技術(shù)逐漸成為制約行業(yè)發(fā)展的關(guān)鍵因素。晶圓搬運(yùn)機(jī)械手是IC裝備的**之一,其性能的優(yōu)劣直接影響晶圓的生產(chǎn)效率和制造質(zhì)量,體現(xiàn)著整個(gè)加工系統(tǒng)的自動(dòng)化程度和可靠性。在晶圓加工系統(tǒng)中包含兩類晶圓搬運(yùn)機(jī)械手:大氣機(jī)械手(FI robot) 和真空機(jī)械手(Vacuum robot)。前者將晶圓從晶圓盒中取出并放到預(yù)對(duì)準(zhǔn)設(shè)備上,工作環(huán)境滿足一定的大氣潔凈度要求,控制精度要求相對(duì)較低。后者將晶圓從預(yù)對(duì)準(zhǔn)設(shè)備上取下,搬運(yùn)到各個(gè)工位進(jìn)行刻蝕等工藝流程加工,并將加工完的晶圓搬運(yùn)到接口位置,等待大氣機(jī)械手放回晶圓盒。這些工藝流程需要在真空環(huán)境下進(jìn)行,機(jī)...
2025-05-31 -
 浙江進(jìn)口晶圓運(yùn)送機(jī)械吸臂廠商
浙江進(jìn)口晶圓運(yùn)送機(jī)械吸臂廠商本發(fā)明涉及一種半導(dǎo)體制造技術(shù),尤其是一種用于晶圓搬運(yùn)的機(jī)械手。 背景技術(shù): 在半導(dǎo)體加工設(shè)備中,經(jīng)常需要將晶圓在各個(gè)工位之間進(jìn)行傳送,在傳送的過(guò)程中,傳送精度越高,設(shè)備工藝一致性就越好,速度越快,單臺(tái)設(shè)備的產(chǎn)能就越大。隨著半導(dǎo)體工藝的發(fā)展,設(shè)備處理的工藝越來(lái)越復(fù)雜,對(duì)設(shè)備自動(dòng)化程度、柔性化程度要求也越來(lái)越高,這就需要一種定位精度高,速度快的多自由度的機(jī)械手。 技術(shù)實(shí)現(xiàn)要素: 本發(fā)明針對(duì)現(xiàn)有技術(shù)中的不足,提供了一種晶圓搬運(yùn)機(jī)械手,本發(fā)明的機(jī)械手在傳送過(guò)程中晶片中心始終保證直線運(yùn)動(dòng),且角度不會(huì)發(fā)生改變。從而提高機(jī)械手整體剛...
2025-05-31 -
 浙江官方晶圓運(yùn)送機(jī)械吸臂價(jià)格
浙江官方晶圓運(yùn)送機(jī)械吸臂價(jià)格場(chǎng)景是新技術(shù)應(yīng)用中的重要一環(huán),場(chǎng)景越多意味著應(yīng)用的廣大性和未來(lái)的期望空間越大,而如果一款技術(shù)誕生沒(méi)有實(shí)際的應(yīng)用場(chǎng)景,即無(wú)法融入人們的日常生活和生產(chǎn)制造中,這對(duì)它的后續(xù)發(fā)展影響是致命的。 機(jī)械手臂的應(yīng)用場(chǎng)景有哪些呢?它的應(yīng)用特點(diǎn)十分明顯,主要代替人工從事場(chǎng)景危險(xiǎn)的工作或者是代替密集型、重復(fù)性高的動(dòng)作。如果工作場(chǎng)景符合上述兩個(gè)特點(diǎn),機(jī)械手臂都可以得到應(yīng)用。 機(jī)械手臂應(yīng)用場(chǎng)景多在制造業(yè),有重工業(yè)屬性,如金屬加工、拋光打磨、裝配、機(jī)床上下料、碼垛/搬運(yùn)、橡膠/塑料、分揀等。 通用性強(qiáng),能適應(yīng)多種作業(yè);工藝性好,便于維修調(diào)整。浙江官方晶圓運(yùn)送機(jī)械吸臂價(jià)格 中國(guó)擁有龐大的制造業(yè),是世界弟...
2025-05-31 -
浙江進(jìn)口晶圓運(yùn)送機(jī)械吸臂
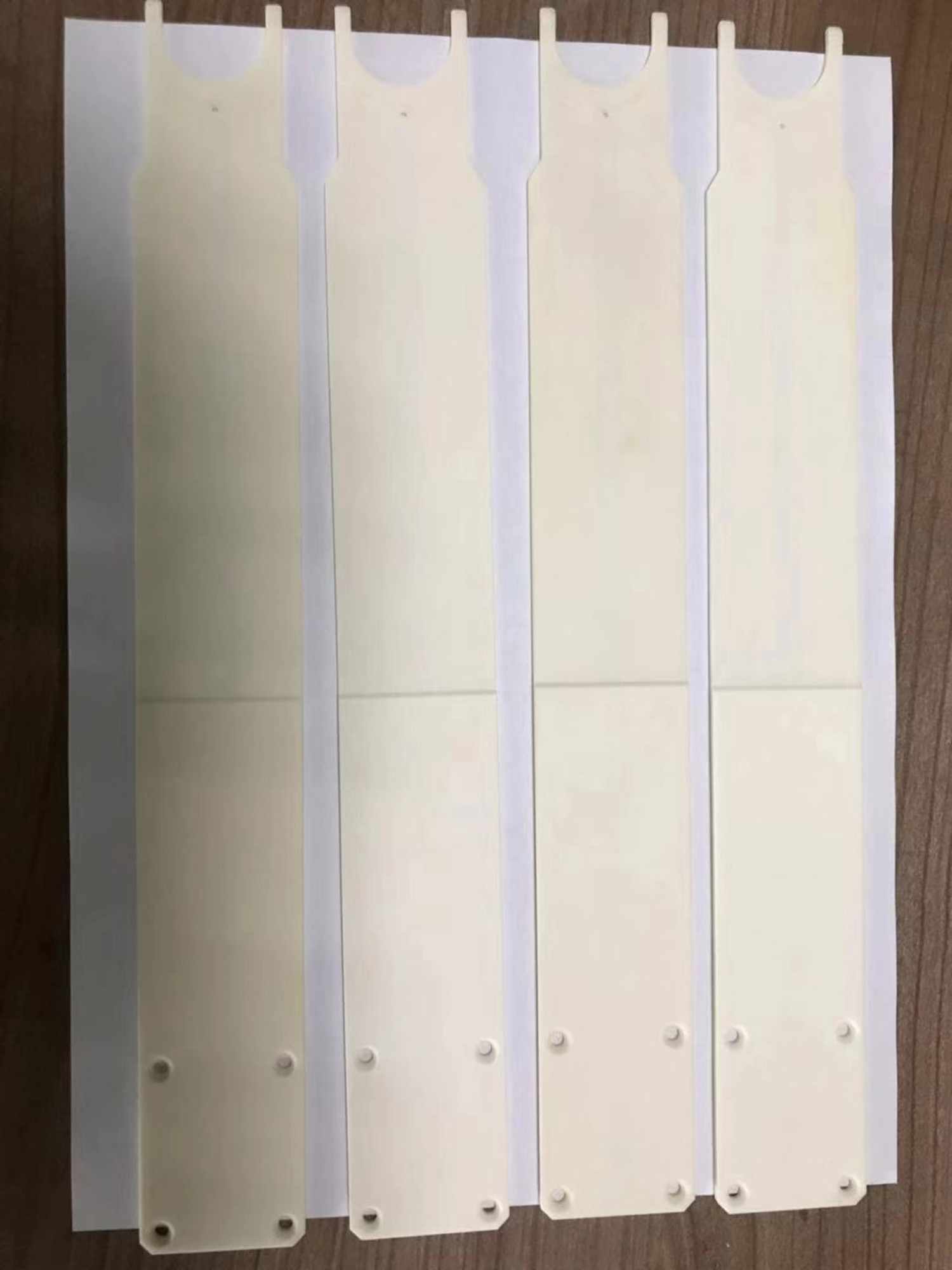
背景技術(shù): 晶圓的生產(chǎn)與制作屬極為精密的加工技術(shù),其通常需借助晶圓傳輸裝置來(lái)進(jìn)行運(yùn)輸傳遞等作業(yè)。例如,準(zhǔn)備對(duì)晶圓進(jìn)行刻蝕加工時(shí),需要利用晶圓傳輸裝置將晶舟內(nèi)的待刻蝕晶圓傳輸至刻蝕機(jī)臺(tái)內(nèi)。 現(xiàn)有一種晶圓傳輸裝置包括機(jī)械手臂,該機(jī)械手臂的表面設(shè)有卡槽,晶圓用于放置在該卡槽內(nèi),以防止機(jī)械手臂在傳送晶圓時(shí)發(fā)生晶圓平移(即晶圓相對(duì)機(jī)械手臂運(yùn)動(dòng))。然而,現(xiàn)有機(jī)械手臂易出現(xiàn)碰撞損傷,另外,機(jī)械手臂的傳送晶圓效率較低,影響了生產(chǎn)效率。 直角坐標(biāo)系機(jī)械手臂有三個(gè)主自由度。浙江進(jìn)口晶圓運(yùn)送機(jī)械吸臂 本發(fā)明針對(duì)現(xiàn)有技術(shù)中的不足,提供了一種晶圓搬運(yùn)機(jī)械手,本發(fā)明的機(jī)械手在傳送過(guò)程中晶...
2025-05-30 -
 福建晶圓運(yùn)送機(jī)械吸臂價(jià)格
福建晶圓運(yùn)送機(jī)械吸臂價(jià)格出了通用二自由度空間模塊(TODOM)的概念,并以通用TODOM作為空間機(jī)械臂的構(gòu)造模塊。TO-DOM由兩個(gè)旋轉(zhuǎn)模塊及一個(gè)連接模塊共三個(gè)基本模塊組成。根據(jù)空間機(jī)械臂的具體構(gòu)型需要,將TODOM的三個(gè)基本模塊之間的機(jī)械接口進(jìn)行專門(mén)設(shè)計(jì),即可配置成確定構(gòu)型的二自由度關(guān)節(jié)。由這樣數(shù)個(gè)不同構(gòu)型的二自由度關(guān)節(jié)可以組裝出具有偶數(shù)個(gè)自由度的空間機(jī)器臂。采用一體化概念設(shè)計(jì)的TODOM減小了關(guān)節(jié)的質(zhì)量與體積,提高了系統(tǒng)的可靠性。通過(guò)對(duì)由TODOM構(gòu)成的一套二自由度關(guān)節(jié)進(jìn)行的試驗(yàn)初步驗(yàn)證了TODOM設(shè)計(jì)概念的合理性及可行性。觸手內(nèi)部分為許多小格子,通過(guò)壓縮空氣流動(dòng)來(lái)做出各種動(dòng)作,可以毫無(wú)傷害的握起螞蟻的腰部。福建...
2025-05-30