甘肅自動駕駛系統建模什么品牌好
應用層軟件開發系統建模工具的選型需關注建模效率、兼容性與代碼生成能力。工具應具備直觀圖形化建模界面,提供豐富庫函數(邏輯運算、信號處理模塊),支持拖拽式操作快速構建模型——如汽車電子應用層開發中,可直接調用CAN通信、PWM輸出等模塊,減少重復建模工作。兼容性方面,工具需支持FMU等主流模型交換格式,能與控制系統仿真軟件、硬件在環測試平臺無縫對接,便于開展多工具聯合仿真,驗證應用層軟件與底層硬件的交互邏輯。代碼生成能力是重要指標,工具應能從模型自動生成高效可靠的嵌入式代碼(如C語言),代碼需符合MISRAC等行業標準且具備可追溯性,便于后續代碼審查與測試。此外,配備完善模型驗證工具(需求追溯、覆蓋率分析)的軟件,能進一步提升應用層軟件開發的質量與效率,是選型的重要考量因素。整車仿真基于模型設計開發費用較低,可反復仿真優化,減少實物樣件改動,降低成本。甘肅自動駕駛系統建模什么品牌好
應用層軟件開發系統建模是將軟件功能需求轉化為可執行模型的過程,為復雜系統開發提供結構化框架。在汽車電子應用層開發中,針對車身電子控制模塊,建模需明確燈光控制、門窗調節等功能的狀態轉換邏輯,通過狀態機模型定義不同輸入信號(如遙控指令、車內按鍵)對應的執行動作,確保功能邏輯的完整性。發動機控制器應用層建模則需整合傳感器信號處理、執行器驅動邏輯,將空燃比控制、怠速調節等算法轉化為模塊化模型,各模塊通過清晰的接口傳遞數據,便于團隊協作開發。建模過程需考慮軟件的可擴展性,采用標準化的模型架構,使新增功能(如自適應巡航輔助)能快速集成到現有模型中。通過系統建模,可在開發早期梳理功能邊界與交互關系,減少后期集成階段的接口矛盾,同時為自動代碼生成提供可靠的模型基礎,提升應用層軟件的開發效率與質量。山西自動駕駛系統建模哪個軟件性價比高仿真驗證MBD好用的軟件,能搭建多場景驗證環境,快速檢驗系統功能,減少開發問題。
自動駕駛基于模型設計覆蓋感知、決策、控制全流程的可視化建模與仿真驗證,是開發L2+級輔助駕駛系統的高效方法。感知層建模需構建攝像頭、激光雷達、毫米波雷達等傳感器的仿真模型,模擬不同光照強度、天氣狀況下的環境感知過程,計算目標檢測的準確率、漏檢率與響應延遲,優化傳感器數據融合算法。決策層通過狀態機與流程圖構建車道保持、自適應巡航、緊急制動等功能的決策邏輯模型,模擬交叉路口、超車、避障等復雜交通場景下的行為決策過程,驗證決策算法的安全性與合理性。控制層建模需整合車輛動力學參數,構建縱向(油門、制動)與橫向(轉向)控制模型,計算控制指令與車輛運動狀態之間的映射關系,優化PID控制參數以提升軌跡跟蹤精度。基于模型設計支持各層模型的聯合仿真,構建虛擬測試場景庫,驗證自動駕駛系統在海量場景中的表現,大幅降低實車測試的成本與風險,加速系統開發進程。
工業控制系統建模MBD以圖形化方式構建PLC、DCS等控制系統的邏輯模型與動態響應模型,覆蓋從傳感器信號采集到執行器動作輸出的完整控制鏈路。在離散制造業生產線建模中,通過狀態流程圖描述設備的啟停邏輯、物料傳輸的時序關系,構建傳感器觸發信號與執行器動作的聯動模型,仿真不同生產節拍下的系統運行狀態,驗證控制邏輯在正常與異常工況下的響應特性。針對流程工業的過程控制(如化工反應釜溫度控制),需搭建PID控制回路的動態模型,整合溫度傳感器的測量特性與調節閥的動作特性,計算不同比例系數、積分時間、微分時間組合下的溫度控制曲線,優化控制參數以減小超調量、縮短調節時間。建模過程中引入工業現場的典型干擾因素(如電網電壓波動、設備響應延遲),通過仿真評估控制系統的抗干擾能力,確保模型能真實反映工業控制系統的動態特性,為控制系統的設計優化與升級改造提供可靠依據。汽車領域MBD建模服務價格,需結合建模復雜度與服務范圍,合理定價且保障服務質量更關鍵。
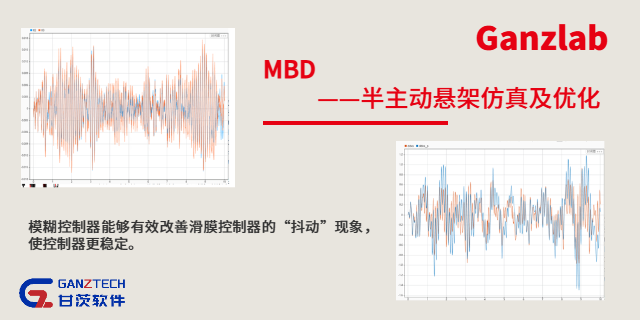
機器人領域基于模型設計(MBD)工具需適配多域控制特性,涵蓋動力學建模、控制算法設計與代碼生成功能。動力學建模工具應能構建機械臂DH參數模型,自動計算運動學正逆解,模擬不同關節角度下的末端位置,支持重力補償、摩擦力矩等動力學特性分析,為控制算法設計提供精確植物模型。控制算法設計工具需具備圖形化建模能力,支持PID控制、模型預測控制(MPC)等算法的搭建與仿真,可快速驗證軌跡跟蹤、力控柔順等控制策略效果——如協作機器人開發中,能模擬人機交互時的力反饋控制邏輯。代碼生成工具需能將控制模型轉化為可在ROS/RTOS等機器人控制器上運行的實時代碼,支持代碼優化以滿足毫秒級甚至微秒級控制周期需求。此外,支持多工具聯合仿真的工具更具優勢,能實現動力學模型與控制算法模型的無縫集成,驗證整個機器人系統的動態響應,保障MBD流程的連貫性與有效性。工程類專業教學實驗系統建模,能幫學生把理論變直觀模型,動手操作學得快、練本事。甘肅自動駕駛系統建模什么品牌好
機器人領域MBD可用合適工具,搭模型、做仿真,調出來的機器人動作準,開發也快。甘肅自動駕駛系統建模什么品牌好
智能交通系統基于模型設計的好用軟件,需具備交通流建模、信號控制邏輯仿真等功能。在交通流量預測模塊,應能整合歷史車流量數據與實時路況信息,構建宏觀交通流模型,準確計算不同時段的道路通行能力,為信號配時優化提供數據支撐。針對智能路口控制,軟件需支持信號燈相位切換邏輯的可視化建模,模擬不同配時方案下的車輛延誤時間,通過對比分析選出合理控制策略。車路協同仿真功能也不可或缺,能搭建車輛與路側設備的通信模型,驗證信息交互延遲對協同決策的影響,確保自動駕駛車輛在復雜交通場景中的響應可靠性。好用的軟件還應具備開放的模型接口,可與交通監控系統、車輛導航平臺的數據對接,實現仿真結果與實際交通狀況的動態校準,提升模型對智能交通系統設計的指導價值。甘肅自動駕駛系統建模什么品牌好
- 甘肅自動駕駛系統建模什么品牌好 2025-07-14
- 深圳應用層軟件開發MBD好用的軟件 2025-07-14
- 成都低成本科學計算工具推薦 2025-07-14
- 長春自主可控科學分析軟件哪個好 2025-07-14
- 河北仿真驗證基于模型設計服務價格 2025-07-14
- 天津仿真驗證基于模型設計哪個開發公司靠譜 2025-07-14
- 廣西工程領域科學計算品牌 2025-07-14
- 山西自動駕駛系統建模哪個軟件性價比高 2025-07-14
- 湖北autosar國產工具鏈系統建模服務商推薦 2025-07-14
- 重慶仿真驗證基于模型設計開發公司哪家好 2025-07-14
- 北京風景區智慧管理平臺開發公司 2025-07-14
- 中山產品合格證打印機公司 2025-07-14
- 重慶進口手持平板終端 2025-07-14
- 新疆進口RFID防錯追溯軟件 2025-07-14
- 成都數據采集軟件操作流程 2025-07-14
- 三水區省電網絡布線服務熱線 2025-07-14
- 徐匯區性價比高SMT加工廠 2025-07-14
- 浙江品牌外貿獨立站軟件 2025-07-14
- 浙江工業機器人管理系統 2025-07-14
- 飛騰主板應用領域 2025-07-14