遼寧5G疲勞駕駛預警系統
(上篇)車載自帶算法的疲勞駕駛預警集成MDVR實現云臺管理的原理
車載疲勞駕駛預警系統與MDVR(MobileDigitalVideoRecorder,移動數字視頻錄像機)集成,結合云臺管理,可以實現對駕駛員狀態的實時監控、數據存儲和遠程管理。以下是其工作原理和實現細節:
1.系統架構集成MDVR的疲勞駕駛預警系統主要包括以下模塊:
-攝像頭模塊:用于采集駕駛員面部圖像和車內環境視頻。
-云臺控制模塊:調整攝像頭角度,確保ZUI佳監控范圍。
-MDVR模塊:負責視頻錄制、存儲和傳輸。-疲勞檢測算法模塊:實時分析駕駛員狀態,判斷是否疲勞。
-通信模塊:實現車載設備與云平臺的數據傳輸。
-云平臺:用于遠程管理、數據分析和預警通知。
2.工作原理
2.1數據采集-攝像頭采集:-攝像頭實時捕捉駕駛員面部圖像,用于疲勞檢測。-同時錄制車內環境視頻,存儲到MDVR中。-傳感器數據:-結合方向盤傳感器、車速傳感器等,提供輔助判斷數據。
2.2疲勞檢測算法-實時分析:-車載終端運行輕量化的疲勞檢測算法,分析攝像頭采集的圖像。-檢測指標包括閉眼頻率、打哈欠次數、頭部姿態等。-多模態融合:-結合傳感器數據(如方向盤轉動頻率、車速變化),提高檢測準確性。 疲勞駕駛預警系統具備自動校準功能,能夠根據環境變化調整圖像參數,以保持識別精度.遼寧5G疲勞駕駛預警系統
疲勞駕駛預警系統
(中篇)自帶算法的疲勞駕駛預警系統是一種先進的技術,旨在通過監測駕駛員的疲勞狀態并及時發出預警,以提高駕駛安全。該系統具有豐富的外WEI設備聯動接口,可以連接多種設備以實現全方WEI的預警和管理功能。以下是對該系統可連接的方向盤振動器、座椅振動器以及MDVR平臺進行詳細闡述:
實時監控:MDVR平臺可以實時接收并顯示駕駛員的疲勞狀態、車輛行駛軌跡、速度等關鍵信息,為管理人員提供全MIAN的監控視野。數據分析:利用大數據分析技術,MDVR平臺可以對存儲的數據進行深入挖掘和分析,生成疲勞駕駛統計報表、車輛行駛軌跡圖等關鍵信息,為車隊管理和安全駕駛提供有力支持。遠程管理:管理人員可以通過MDVR平臺對車輛和駕駛員進行遠程監控和管理,包括查看實時視頻畫面、調整攝像頭角度和焦距、接收預警信息等。應急指揮:在緊急情況下,管理人員可以通過MDVR平臺進行遠程指揮和調度,確保車輛和人員的安全。
陜西國內司機行為檢測預警系統主流疲勞駕駛預警系統適用于多種類型的車輛,包括長途客/貨運車,危險品運輸車輛,校車,出租車,公交車和家用轎車.

(上篇)高自帶算法的疲勞駕駛預警系統是一種智能化的安全設備,它能夠通過分析駕駛員的生理特征、駕駛行為及車輛行駛狀態等信息,實時監測駕駛員的疲勞狀態,并在必要時發出預警信號。以下是對該系統的報警狀態及報警參數的詳細闡述:
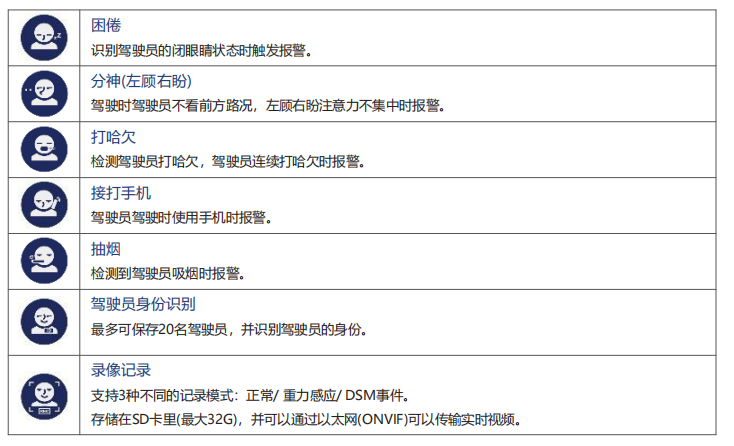
一、報警狀態疲勞駕駛預警:當系統檢測到駕駛員處于疲勞狀態時,會立即觸發預警。疲勞狀態的判斷通常基于駕駛員的面部特征(如眨眼頻率、閉眼時間、頭部運動等)、眼部信號、體態特征以及車輛行駛狀態等信息。報警方式可能包括語音提示、震動提醒、燈光閃爍等,以引起駕駛員的注意并促使其采取休息措施。分心駕駛預警:當系統檢測到駕駛員在駕駛過程中分心(如長時間低頭看手機、與乘客交談等)時,也會觸發預警。分心駕駛的判定通常依賴于對駕駛員視線方向、頭部位置及動作等信息的分析。其他預警:除了疲勞駕駛和分心駕駛預警外,一些先進的系統還可能具備打電話預警、抽煙預警、未系安全帶預警以及攝像頭遮擋預警等功能。這些預警的觸發條件和報警方式因系統而異,但通常都是為了提高駕駛安全性而設計的。
二、報警參數觸發條件:速度范圍:系統通常會在車輛速度處于一定范圍內時(如10km/h到180km/h)進行監測和預警。
(下篇)在疲勞駕駛集成MDVR系統中,TTS喇叭和對講手柄是怎樣通過智慧云平臺下發指令對車端進行交互控制,監控實時作業情況?
三、監控實時作業情況
1.視頻采集與傳輸:MDVR系統持續采集車內外視頻數據,并通過無線網絡將其傳輸給智慧云平臺。云平臺接收到視頻數據后,進行存儲、分析和展示,以便用戶能夠實時監控車輛的作業情況。
2.狀態反饋與報警:MDVR系統還負責監測車輛的狀態信息(如車速、發動機狀態等)以及駕駛員的行為(如疲勞駕駛檢測)。一旦發現異常情況或違規行為,MDVR系統將立即向云平臺發送報警信息。云平臺接收到報警信息后,可以實時通知用戶或采取其他措施進行處理。
綜上所述,在疲勞駕駛集成MDVR系統中,TTS喇叭和對講手柄通過智慧云平臺下發指令對車端進行交互控制,并監控實時作業情況的過程涉及多個技術環節和設備的協同工作。這些設備和技術共同構成了一個高效、智能的監控系統,為交通安全和作業效率提供了有力保障。 車載疲勞駕駛預警系統集成MDVR實現云臺管理,其核XIN在于疲勞檢測算法,云臺控制邏輯和MDVR的高效集成.
(專輯一)自帶算法的疲勞駕駛預警系統的技術原理主要基于先進的視覺識別技術和深度學習算法。
一、核XIN技術與流程視覺識別技術:系統通過安裝在車內的攝像頭實時捕捉駕駛員的面部及肢體動作,如眼睛閉合、眨眼頻率、打哈欠、頭部姿態等。攝像頭捕捉到的圖像會被快速傳輸到系統的處理單元。系統利用深度學習技術對這些圖像數據進行處理和分析。通過深度卷積神經網絡(CNN)等算法提取面部關鍵區域的視覺特征,如眼睛、嘴巴等。算法會分析眼睛的開合程度、閉合時間、眨眼頻率以及打哈欠的頻率等關鍵指標。基于這些分析,系統準確地判斷駕駛員是否處于疲勞狀態。
二、算法模型構建數據收集:為了構建有效的算法模型,需要收集大量關于疲勞駕駛時駕駛員面部和身體特征的圖像數據。這些數據應包括不同駕駛員在不同疲勞程度下的表現,以確保算法的泛化能力和準確性。利用深度學習技術從圖像數據中提取與疲勞相關的關鍵特征,并進行分類標注。這些特征包括眼睛的開合程度、眨眼頻率、打哈欠的頻率等。使用標注好的數據對算法模型進行訓練,通過不斷調整和優化模型參數,提高模型的準確性和魯棒性。在訓練過程中,會采用交叉驗證等方法來評估模型的性能,確保其在不同場景下的適用性。
當系統檢測到駕駛員處于疲勞狀態時,會立即通過方向盤振動器和座椅振動器向駕駛員發出預警信號.遼寧5G疲勞駕駛預警系統
疲勞駕駛預警系統基于圖像智能識別分析技術,實時檢測駕駛員的頭部及眼皮運動,凝視方向,打哈欠等狀態.遼寧5G疲勞駕駛預警系統
(上篇)在疲勞駕駛集成MDVR系統中,TTS喇叭和對講手柄是怎樣通過智慧云平臺下發指令對車端進行交互控制,監控實時作業情況?
在疲勞駕駛集成MDVR(MobileDigitalVideoRecorders,車載數字視頻錄像機)系統中,TTS喇叭和對講手柄通過智慧云平臺下發指令對車端進行交互控制,并監控實時作業情況的過程,涉及多個技術環節和設備的協同工作。以下是對這一過程的詳細解析:
一、系統架構與組件功能
1.智慧云平臺:作為整個系統的控制中心,云平臺負責接收、處理并下發指令給車端設備。它提供API接口,用于接收來自用戶或其他系統的請求,并根據請求內容生成相應的控制指令。
2.MDVR系統:安裝在車輛上,負責采集、存儲和傳輸車內外視頻數據,同時具備GPS定位、無線傳輸等功能。MDVR系統作為車端的核XIN設備,與云平臺進行通信,接收并執行來自云平臺的指令。
3.TTS喇叭:文本到語音(TextToSpeech)的合成設備,用于將云平臺下發的文本指令轉化為語音信號,以便駕駛員能夠聽到并執行。
4.對講手柄:用于駕駛員與云平臺或其他車輛進行語音通信的設備。它通常具有PTT(PushToTalk)功能,即按住按鈕即可說話,松開按鈕則停止說話。 遼寧5G疲勞駕駛預警系統
- 青海司機行為檢測預警系統聯系方式 2025-06-01
- 吉林船舶多路視頻拼接系統開發平臺 2025-06-01
- 甘肅司機行為識別疲勞駕駛預警系統 2025-06-01
- 湖南機車多路視頻拼接系統開發商 2025-06-01
- 工程車360環視攝像頭加裝 2025-06-01
- 西藏360全景多路視頻拼接系統定制開發 2025-06-01
- 重慶4G通信司機行為檢測預警系統 2025-06-01
- 四川防司機行為檢測預警系統 2025-06-01
- 新疆司機行為監測疲勞駕駛預警系統 2025-06-01
- 廣東AI疲勞駕駛預警系統 2025-06-01
- 南通選購汽車座椅前后調節開關 2025-06-01
- 常州安裝三維掃描服務專業團隊在線服務 2025-06-01
- 南京鍛件冷鍛加工冷擠壓件 2025-06-01
- 自動化涂膠導熱膠GFC3500LV中國銷售 2025-06-01
- 深圳小型車陶瓷剎車片哪家好 2025-06-01
- 湖北永樂加熱片廠家 2025-06-01
- 四川汽車行業隔熱棉生產廠家 2025-06-01
- 青島打印機固定mopp膠帶報價 2025-06-01
- 蘇州批發雙色注塑價格 2025-06-01
- 嘉定區汽車配件廠家哪家好 2025-06-01